ARTÍCULOS
Variabilidad espacial de la profundidad del suelo. Métodos de interpolación para el sudoeste bonaerense
Frolla, F.D.; Zilio, J.P.; Kruger, H.
Ilwis es un software elaborado bajo código abierto de libre copia y distribución desde fines del 2006 (Licencia GNU GPL).
Más información en: http://www.ilwis.org/; http://52north.org/communities/ilwis/
Recibido 14 de marzo de 2013
Aceptado 09 de septiembre de 2015
Publicado online 18 de noviembre de 2015
RESUMEN
La presencia de tosca es una de las principales limitantes de la producción agropecuaria del sudoeste bonaerense. La elaboración de mapas de profundidad de suelo resulta un paso previo a su manejo por ambientes. Se realizaron 199 observaciones, con sonda mecánica y en forma de malla semirígida, en un lote de 60 ha cercano a la localidad de San Germán (partido de Puán, provincia de Bs. As.). Los objetivos fueron: comparar la habilidad predictiva de dos métodos usuales de interpolación (Kriging ordinario y Ponderación de Distancia Inversa o IDW) y determinar la densidad mínima de observaciones requerida para delimitar unidades de manejo de suelos y cultivos. Los datos fueron desglosados en 5 densidades de puntos (0.5-0.75-1- 1.5-2 observaciones.ha-1). Los mapas obtenidos fueron contrastados con un set de observaciones reservadas específicamente con el fin de comparar la capacidad de predicción de estos. Se utilizaron estadísticos como el Promedio Cuadrado del Error (PCE), el Estimador de predicción (E) y el coeficiente de determinación para regresiones lineales y polinómicas. Se realizaron mapas de error para identificar la variabilidad de la predicción. Los interpoladores no presentaron diferencias marcadas en su exactitud, pero sí lo hizo la densidad de observaciones. Por su simplicidad relativa y una ligera tendencia a lograr mejores valores en los estadísticos utilizados, se sugiere el uso de IDW. Para la delimitación de unidades homogéneas de manejo en función de la profundidad de suelo se adoptó un mínimo de 1 observación ha-1, recomendándose analizar la conveniencia de utilizar una densidad mayor de observaciones (1,5-2 ha-1) en sectores complejos, de pobre estimación, que coincidieron con suelos de escasa profundidad.
Palabras clave: Profundidad suelos; Métodos de interpolación; Densidad de observaciones; Kriging.
ABSTRACT
Petrocalcic horizons are among the main soil constraints to agricultural production in the south-west of Buenos Aires province. They decrease effective soil depth and water holding capacity. This paper deals with the mapping of soil depth. The objectives were: to compare predictive ability of two interpolation methods (ordinary Kriging and Inverse Distance Weighted, IDW), and establish the minimum observation density requirements to define management units. In a 60-ha production farm located near San Germán town (Puán district, Bs. As. province), 199 soil depth observations were performed using a mechanical probe. Data were grouped into 5 observation densities (0.5-0.75-1-1.5-2 observation ha-1). Resulting maps were checked against a set of data reserved for this purpose. Statistics like Mean Square Error (PCE), goodness of Prediction estimator (E), and coefficient of determination (R2), for linear and quadratic regressions were used to estimate their precision. Maps representing the Interpolation Error (EI) were made to identify prediction variability. Interpolation methods showed no great differences in precision, but the increase in observation density improved mapping precision. Based on its relative simplicity and a slight trend to better statistics values, IDW is proposed as a possible standard method, with a minimum density of 1 observation ha-1 for this specific soil management maps. A higher observation densities (1.5 – 2 ha-1), can be used to increase accuracy in more complex areas of this field related to shallow soils.
Keywords: Soil depth; Interpolation methods; Observation density; Kriging.
INTRODUCCIÓN
En la zona semiárida del sudoeste bonaerense la capacidad
de retención de agua de los suelos, combinada con
la variabilidad en las precipitaciones, condiciona la productividad
de verdeos y cultivos de cosecha. Esta capacidad
está definida principalmente por la porosidad, función de
la composición granulométrica y la estructura del suelo y
por la presencia de un horizonte petrocálcico (“tosca”) que
limita la exploración por las raíces.
El efecto del horizonte petrocálcico sobre los rendimientos
ha sido mencionado para la zona semiárida y, en menor
medida, para la subhúmeda (Calviño y Sadras, 1999;
Ross, 2012; Puricelli et al., 1997).
Ross (2012) estudió la influencia del horizonte petrocálcico
sobre cultivos del sudeste bonaerense. Determinó que
la profundidad del suelo resultó una variable de considerable
importancia para analizar la variación espacial del rendimiento
y encontró correlación entre profundidad efectiva
y rendimiento en función de la densidad de muestreo, año
y cultivo. Bragachini et al. (2010) observaron que la delimitación
de ambientes sobre la base de la profundidad
de la tosca permitió un mejor ajuste de la fertilización de
cebada respecto del logrado a partir del uso de mapas de
rendimiento-proteína.
Dada la influencia de la variable estudiada sobre la producción
de cultivos, la determinación de áreas homogéneas
por profundidad de suelos permite la aplicación de tratamientos
agronómicos específicos (longitud de barbecho,
densidad de siembra, nivel de fertilización), adecuados al
potencial productivo de cada suelo. Esto representa una
tecnología de procesos importante que optimiza el uso de
insumos en un ambiente marginal de alto riesgo climático.
El método más simple, accesible y directo para establecer
la profundidad es la sonda mecánica. Se trata de una
varilla de acero de aproximadamente 1 cm de diámetro y
100 cm de largo, rematada por una punta triangular en su
extremo inferior y un mango en forma de “T” en el superior.
En condiciones favorables de humedad es relativamente
sencilla su introducción en el suelo hasta tocar la superficie
coherente del horizonte petrocálcico. Las observaciones
así obtenidas pueden ser referenciadas geográficamente
con GPS (Sistema de Posicionamiento Global por sus
siglas en inglés). Existen dispositivos más sofisticados
como los sensores de conductividad eléctrica Veris y EM-
38 (Peralta et al., 2012), o los basados en la reflexión de
ondas electromagnéticas como el Georadar (Bragachini et
al., 2010). Estos permiten realizar mapas de profundidad
de suelos en forma rápida y, posiblemente, más precisa.
Sin embargo se trata de equipamientos costosos, habitualmente
no disponibles en la región.
La representación gráfica de la información obtenida
puede realizarse sobre programas de uso libre como
Google Earth, o bien utilizando programas más complejos
que permitan la interpolación de los datos y el desarrollo
de mapas a partir de observaciones puntuales (QGIS, R,
ILWIS, SAGA).
Existen diversos métodos de interpolación: Ponderación
de la distancia inversa (Inverse Distance Weighted), Vecino
más cercano (Nearest-neighbor interpolation), y Kriging con
sus variantes (Co-Kriging, universal, simple y ordinario). Los
más utilizados en estudios de este tipo son Kriging y Ponderación
de la Distancia Inversa. Algunos trabajos destacan
mejores estimaciones para Kriging (Creutin et al., 1982; Tabios
y Salas, 1985; Warrick et al., 1988; Laslett et al., 1987;
Leenaers et al., 1990), mientras que otros autores lo hacen
para IDW (Weber y Englund, 1992; Wollenhaupth et al.,
1994; Gotway et al., 1996).
Los interpoladores se basan en la premisa que puntos
cercanos están más relacionados entre sí que aquellos que
se encuentran más lejanos. IDW y Kriging establecen un
peso para cada punto utilizado en la interpolación. En la
Ec.1 se muestra la fórmula del cálculo. Ambos métodos se
diferencian en el modo de establecer el valor de Wi para
cada punto.
![]()
Ec.1. Estimación de valores interpolados.
Referencias: Z*:valor estimado o interpolado, Zi: valores reales utilizados
en el cálculo, Wi: peso o factor de ponderación.
Fuente: Modificado de Villatoro et al. (2008)
IDW establece pesos relativos en función de la distancia entre Z* y los Zi vecinos. A mayor distancia menor peso. El Wi es afectado en su cálculo por un exponente que se relaciona con la variabilidad de los datos. Se utilizan exponentes de grado 1 para datos con una buena distribución normal y hasta grado 4 para alta variabilidad entre datos. Kriging utiliza la técnica del semivariograma. Este representa la varianza entre valores de puntos observados a distancias predeterminadas y permite estimar la distancia máxima dentro de la cual los puntos presentan dependencia espacial. Dentro de este rango, se estima el Wi mediante la Ec.2.
![]()
Ec.2. Cálculo del Wi en Kriging.
Referencias: C-1: inversa de la semivarianza para un punto conocido,
d: semivarianza de la distancia del punto desconocido al punto
conocido.
Fuente: Elaboración propia para el presente trabajo.
La información sobre densidad de observaciones y confiabilidad de mapas en estos ambientes es escasa. Seasevalle (2013) comparó mapas de profundidad de suelos con observaciones espaciadas 20 y 60 m. Observó mayor precisión con la densidad mayor en suelos profundos (0,8 a 1 m), pero ambas densidades identificaron de forma similar los suelos con profundidad menor a 0,4 m. Según Krüger y Venanzi (2009), la determinación de la profundidad del suelo resulta dificultosa a causa de la variabilidad espacial de este parámetro. En relieves suavemente ondulados las menores profundidades se encuentran en la medialoma alta (menos de 50 cm) y las mayores en los bajos (70-100 cm.). Sin embargo esta asociación no siempre se verifica. Además en relieves planos se requiere un alto número de observaciones para obtener información confiable. El número de observaciones requerido para la elaboración del mapa guarda relación con la precisión esperada y el objetivo de este. En el caso estudiado, el mapa de profundidades está destinado a delimitar grandes unidades de manejo de suelos, hecho que le confiere características especiales al balance entre precisión y trabajo de campo. Los objetivos de este trabajo fueron: a) comparar la capacidad predictiva de ambos métodos de interpolación para el mapeo de la profundidad útil del suelo a nivel de predio en el sudoeste bonaerense y b) establecer valores mínimos de la densidad de observaciones requerida para la elaboración de unidades homogéneas de manejo de suelos y cultivos.
MATERIALES Y MÉTODOS
Se trabajó en un lote de 60 ha cercano a la localidad de
San Germán, partido de Puán, provincia de Buenos Aires.
En él se realizaron 199 determinaciones de profundidad del
suelo hasta la capa de tosca mediante una varilla metálica
graduada. Este número permitió desdoblar el set de
datos en grupos de observaciones que, distribuidas homogéneamente
en el lote, determinaron densidades de 0.5-
0.75-1-1.5-1.75 y 2 observaciones ha-1. No se consideró
viable la realización de más de 2 obs.ha-1 si la técnica está
orientada al mapeo expeditivo por productores o asesores.
Se reservaron los 79 puntos restantes para control de las
interpolaciones. Este número representa un 60% de las observaciones
en las densidades mayores, proporción que se
estimó suficiente para tal fin. Se utilizó un diseño en malla
semirígida, determinado por 10 transectas paralelas con
observaciones a intervalos regulares de aproximadamente
60 m, las que fueron georreferenciadas con un GPS de
mano (Garmin 12®).
Se obtuvo estadística descriptiva de los datos y se utilizó
el test de Kolmogorov para analizar su normalidad. Se
confeccionaron mapas de profundidad de suelos para cada
grupo de observaciones utilizando el Software Ilwis 3.7.2.
Los antecedentes locales sobre el uso de estas técnicas
son escasos, por lo que se tomaron en cuenta los dos interpoladores
más mencionados en estudios de carácter
agronómico-edafológico: 1) IDW, con dos exponentes de
ponderación (primero y segundo grado), con distancias de
interpolación entre 100-180 m según la densidad de puntos
y, 2) Kriging Ordinario. Se consideró que este tipo de
Kriging ajusta mejor a la dinámica de los datos, con medias
locales no necesariamente próximas a la media de la
población, y limitando el dominio de estacionaridad de la
media a la vecindad local media desconocida (Gallardo y
Maestre, 2010). Se realizaron semivariogramas direccionales,
calculando la distancia entre puntos que verifica la relación
espacial, y comprobando la inexistencia de tendencias
anisotrópicas en los datos que pudieran determinar variaciones
en la aplicación del método.
Sobre los mapas logrados se colocaron los puntos de
control contrastando el valor observado con el valor interpolado;
esto permitió estimar el error de interpolación (EI),
calculado como el cuadrado de las diferencias entre valores
observados y esperados, así como representar su variación
espacial en un mapa. Para comparar la exactitud de
las interpolaciones se utilizaron además otros estadísticos.
Promedio Cuadrado del Error (PCE): tal como fuera definido
por Villatoro et al. (2008), es el promedio del residuo
entre el valor estimado y el valor observado para un punto
dado, elevado al cuadrado. Mientras más pequeño es este
valor más exacta es la predicción. (Ec.3). Este estadístico
difiere del denominado Error Cuadrático Medio en que no
utiliza la raíz cuadrada del residuo.
El Estimador de predicción (E): compara el promedio
general de los datos con los valores estimados. Cuando
el valor de E=100 la predicción es perfecta, valores negativos
indican la conveniencia de usar el promedio general
del lote (Kravchenko, 2003). (Ec.4). R2: coeficiente
de determinación para distintos tipos de regresiones (lineal,
polinómica, exponencial), entre valores observados
y predichos.

Ec.3-4. Superior: fórmula para el cálculo de PCE (Ec.3), donde
Z(Xi) es el valor observado; Z’(Xi), el valor estimado o predicho
y n, el número de puntos utilizado. Inferior fórmula utilizada en la
elaboración del estadístico E (Ec.4), donde Z(Xi) es el valor observado;
Z’(Xi), el valor estimado o predicho y , el promedio de
la muestra.
Fuente: Ecuaciones modificadas de Villatoro et al. (2008).
RESULTADOS Y DISCUSIÓN
La fig.1 muestra el histograma y estadística descriptiva de los datos obtenidos. La bibliografía asume distribución normal para coeficientes de asimetría entre 0-0.5 y coeficientes de variación menores al 100%. Por otra parte, la prueba de Kolmogorov arrojó un valor p=0.4016 aceptándose la hipótesis de una distribución normal. Para el método Kriging no se encontró una tendencia clara de anisotropía. Aunque se determinó anisotropía zonal, Gallardo y Maestre (2006) indican que esto no resulta un argumento suficiente para confirmar el supuesto de anisotropía. Por este motivo se confeccionaron semivariogramas isotrópicos (omnidireccionales) para todos los casos, con un alcance de 500 m.

Figura 1. Histograma y análisis estadístico descriptivo de los datos obtenidos.
Fuente: Elaboración propia para el presente trabajo.
En la tabla 1 se muestra un resumen de los estadísticos obtenidos para los interpoladores estudiados.
Tabla 1. Resumen de los indicadores de exactitud evaluados.
E = Estimador de predicción, PCE = Promedio Cuadrado del Error, y R2= coeficiente de determinación para la regresión cuadrática entre
valores observados y predichos.

Fuente: Elaboración propia para el presente trabajo.
El estimador E siempre fue mayor que cero, indicando que
el uso de la interpolación es más útil que el valor promedio
del lote. Los R2 de la tabla surgieron de regresiones polinómicas
de segundo grado, las cuales mostraron el mejor ajuste.
En general los estadísticos señalan a IDW grado 2 (IDW-
2), como el interpolador más preciso. Las diferencias fueron
reducidas, indicando que los métodos probados no
difieren mayormente en su capacidad de predicción para
este sitio y variable.
La densidad de observaciones mostró mayor influencia sobre
los estadísticos que el método de interpolación. La mayor
diferencia entre IDW-2 y Kriging se obtuvo con la menor densidad
de observaciones (0.5 obs.ha-1) donde la cantidad de
puntos fue escasa para la construcción del semivariograma
y perjudicó la estimación. Ashraf y Abbaspour (2011) no obtuvieron
diferencias comparando Kriging e IDW para evaluar
la variabilidad de Ca, CaCO3 y pH del suelo. Mallarino
(2001) considera que, si hay suficientes puntos en un lote,
el método de interpolación utilizado no es un factor de mucha
importancia. Por otra parte Sainz Rozas et al. (2011)
determinaron que tanto Kriging como IDW pueden ser utilizados
para confeccionar mapas de CO y pH en una zona
cercana a la de estudio.
El hecho de que Kriging no realice mejores predicciones
puede deberse a la falta de estacionaridad de los datos.
Esto implica que la media y la varianza dependan solo de
la distancia que los separa y no de la posición espacial en
el lote (Gutiérrez-López et al., 2011). Se ha destacado que
pequeñas variaciones en el relieve, atribuibles a cambios
en las geoformas, suelen tener relación con la profundidad
del horizonte petrocálcico, hecho no detectado por el interpolador
debido a la mencionada falta de estacionaridad.
En forma general la precisión indicada por los valores de
los estadísticos aumentó con la densidad de observaciones
obteniéndose, como cabía esperar, el máximo con la mayor
densidad. E y R2, intuitivamente más fáciles de interpretar, muestran niveles de precisión entre 40 y 50%. De la misma
forma, la variación de los estadísticos señala como poco
precisas las dos densidades menores (0,5 y 0,75 obs. ha-1),
donde el nivel de precisión sería menor al 20%. Resulta llamativa
la caída de los estadísticos en 0,75 obs.ha-1, difícil de
interpretar como no sea por una distribución de puntos menos
homogénea que en los restantes grupos (fig.2).
En las densidades intermedias (1 a 1,75 obs.ha-1), los
valores tienden a estabilizarse. En función de esta característica
y considerando aspectos operativos (trabajo de
campo, tiempos, costos), se justifica optar por la menor
densidad dentro de este rango (1 obs.ha-1).
La fig.3 muestra los mapas de profundidad del suelo resultantes
de la interpolación con Kriging ordinario e IDW-2
en tres densidades: 0,5-1 y 2 obs.ha-1. Se observa que el
detalle del patrón de distribución de profundidades aumenta
con la densidad de observaciones sin presentar diferencias
sustanciales entre interpoladores.

Figura 2. Variación de los estadísticos E, PCE y R2 en función de la densidad de observaciones para el interpolador IDW-2.
Fuente: Elaboración propia para el presente trabajo.
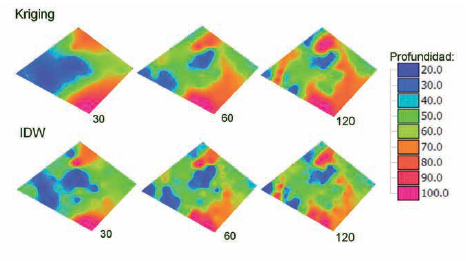
Figura 3. Mapas de profundidad de suelos elaborados con Kriging e IDW-2 (profundidades en cm). El valor en la base de cada mapa
indica el número de puntos utilizados para su elaboración y corresponde a densidades de 0,5-1 y 2 obs. ha-1 respectivamente.
Fuente: Elaboración propia para el presente trabajo.
La finalidad con que se utiliza el mapa de profundidad
de suelos incide sobre sus requerimientos de precisión. La
maquinaria agrícola de última generación tiene capacidad
para variar niveles de insumos en el orden de metros y
demanda una alta precisión del mapa. El uso de maquinaria
convencional requiere, en cambio, unidades de manejo
de mayor tamaño relativo y forma geométrica regular. Esto
implica la combinación de unidades cartográficas del mapa
de profundidad y puede justificar una menor precisión relativa
en función de aspectos operativos.
En la práctica, el lote de producción que aparece en la fig.3
fue dividido en dos unidades de manejo aproximadamente
iguales: una mitad (superior izquierda), donde dominan valores
de profundidad menores a 50 cm, y otra (inferior derecha)
con valores superiores. En función de las características climáticas
y edafológicas de la región, en la primera se discute
la conveniencia de realizar agricultura, mientras que en la
segunda se recomienda la fertilización nitrogenada del trigo.
Para esta delimitación cualquiera de las tres densidades de
observaciones representadas en la figura hubiese resultado
aceptable. Sin embargo, teniendo en cuenta la variación de
los estadísticos representados en la fig.1, se entiende que
1 obs.ha-1 resulta un compromiso aceptable entre costo (intensidad
del trabajo de muestreo) y beneficio (precisión del mapa).
La fig.4 muestra la variación espacial del error de interpolación
(EI), obtenido con densidades de 0,5 y 2 obs.ha-1.
El valor de EI aumenta a medida que el dato interpolado
difiere del observado. De la comparación con la fig.3 surge que las áreas con mayores valores del EI se asocian
con suelos de baja profundidad y con su transición hacia
suelos más profundos. Al no coincidir exactamente la superficie topográfica con la superficie del horizonte petrocálcico,
la transición entre suelos someros y profundos suele
ser abrupta. El incremento del EI en estos casos se explica
porque el valor interpolado, sobre la base de la profundidad
de los puntos próximos, resulta muy diferente del real.
Una alternativa para mejorar la precisión del mapa sin
incrementar sensiblemente la densidad de observaciones
sería la detección de estos sectores complejos mediante
un muestreo inicial de baja intensidad y su posterior incremento
en ellos a fin de disminuir el EI. Al respecto Ross
(2012) destaca en su trabajo la presencia de microambientes
con mayor variabilidad en la profundidad a la tosca,
donde recomienda mayor número de observaciones.
La fig.5 analiza el incremento esperado del EI a través
de la correlación entre los valores interpolados y los reales
para distintas densidades de observaciones. Para ello se
comparó, en cada densidad de muestreo, el set total de
datos con un set reducido formado por todos aquellos puntos
con EI<500, logrado a través de la exclusión de sectores
conflictivos por cambios abruptos en la profundidad del
suelo. Esta eliminación afectó aproximadamente un 20%
de los datos estudiados. Se observa un aumento medio de
0,2 puntos en el R2 y una sensible disminución del EI. Estos
datos indican la conveniencia de realizar nuevas experiencias
a fin de chequear esta hipótesis.
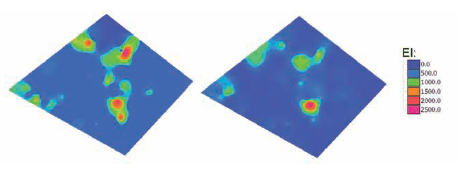
Figura 4. Variación espacial del error de interpolación (EI) para 0.5 (izq.), y 2 obs.ha-1 (der.).
Fuente: Elaboración propia para el presente trabajo.

Figura 5. Densidad de observaciones y variación del valor medio de EI, y del R2 de la relación valor interpolado vs. valor real. Se consideran
el set de datos completo y un set reducido con EI<500. Eje vertical izquierdo valores de R2, eje vertical derecho valores para el EI.
CONCLUSIONES
En zonas como la estudiada fue posible la realización de mapas de profundidad de suelos con fines de manejo por ambientes. Los métodos disponibles, aunque laboriosos desde el punto de vista del trabajo de campo, fueron relativamente simples y accesibles. Los interpoladores estudiados no mostraron diferencias importantes en su capacidad de predicción. Por su mayor facilidad de cálculo y una ligera tendencia a lograr mejores valores en los estadísticos utilizados se sugiere el uso de la Ponderación de Distancia Inversa (IDW), grado 2. La precisión de los mapas aumentó con la densidad de observaciones en el rango 0,5-2 obs.ha-1. Para el caso especial de la delimitación de unidades de manejo por ambientes con maquinaria convencional, una densidad de 1 obs.ha-1 produjo valores de precisión aceptables. Se detectó un mayor error de interpolación en áreas de suelos someros y su transición hacia suelos más profundos. Se requiere mayor información acerca del posible efecto de la aplicación de densidades de muestreo variables sobre la precisión del mapa resultante.
AGRADECIMIENTOS
Los autores agradecen a la Sra. Ana María Del Elce y a la Ing. Agr. Magalí Gutiérrez la posibilidad de realizar este estudio en su establecimiento y a los ayudantes de campo Sres. Rubén Elorriaga y Rubén Giménez por su colaboración en tareas de campo.
BIBLIOGRAFÍA
1. ASHRAF, S.; ABBASPOUR, H. 2011. Study Of Soil Properties, Using Kriging and In Inverse Distance Weighting Methods. Advances in Environmental Biology. Vol. 5(9), 2870-2875.
2. BRAGACHINI, M.; MÉNDEZ, A.; SCARAMUZZA, F.; VÉLEZ, J.; VILLARROEL, D.; MASSIGOGE, J. 2010. Análisis del rendimiento y la calidad de la cebada cervecera en función de la profundidad de tosca en el perfil del suelo. INTA EEA Manfredi, Chacra Experimental Integrada Barrow del INTA. (http://www.agriculturadeprecision.org/articulos/monitores-rendimiento/Analisis-Rendimiento-YCalidad-Cebada-Cervecera.asp, verificado: 10 de enero de 2013.
3. CALVIÑO, P.A.; SADRAS, V.O. 1999. Interannual variation in soybean yield: interaction among rainfall, soil depth and crop management. Field Crops Research 63, 237-246.
4. CREUTIN, L.; OBLED, C. 1982. Objective analyses and mapping techniques for rainfall fields: An objective comparison. Water Resour. Res. Vol.18, 413-431.
5. GALLARDO, A.; MAESTRE, F.T. 2006. Geo-estadística. Asociación Española de Ecología Terrestre. Revista Ecosistemas. Vol.15(3), 48-58.
6. GALLARDO, A.; MAESTRE, F.T. 2010. Métodos geo-estadísticos para el análisis de datos ecológicos espacialmente explícitos. Universidad Rey Juan Carlos. (http://www.escet.urjc.es/biodiversos/espa/investigacion/intercambio/doc/publicaciones/Ecologia_espacial_book_Cap6.pdf, verificado: 12 de enero de 2013.
7. GOTWAY, C.A.; FERGURSON, R.B.; HERGERT, G.W.; PETERSON, T.A. 1996. Comparison of kriging and inverse-distance methods for mapping soil parameters. Soil Sci. Soc. Am. J. Vol 60, 1237-1247.
8. GUTIÉRREZ-LÓPEZ, A.; RAMIREZ, A.; LEBEL, T.; SANTILLÁN, O.; FUENTES, C. 2011. El variograma y el correlograma, dos estimadores de la variabilidad de mediciones hidrológicas. Rev. Fac. Ing. Univ. Antioquia. Vol. 59, 193-202.
9. KRAVCHENKO, A. 2003. Influence of spatial structureon accuracy of interpolation methods. Soil Sci. Soc. of Am. Journal 67:1564-1571.
10. KRÜGER, H.; VENANZI, S. 2009. El agua y el rendimiento del trigo. Algunos cálculos. INTA Estación Experimental. Agropecuaria Bordenave. (http://inta.gob.ar/documentos/el-agua-y-el-rendimiento-del-trigo.-algunos-calculos/, verificado: 27 de enero de 2013.
11. LASLETT, G.M.; MCBRATNEY, A.B.; PAHL, P.J; HUTCHINSON M.F. 1987. Comparison of several spatial prediction methods for soil pH. Journal of Soil Science. Vol 38, 325-341.
12. LEENAERS, H.; OKX J.P.; BURROUGH, P.A. 1990. Comparison of spatial prediction methods for mapping floodplain soil pollution. Catena. Vol 17, 535-550.
13. MALLARINO, P. 2001. Manejo de Nutrientes Sitio-Específico con Enfasis en el Muestreo de Suelos y la Fertilización Variable con Fósforo y Potasio. Department of Agronomy Iowa State University.( http://www.ipni.net/ppiweb/ltams.nsf/$webindex/43B08D9778E9A8020325700D005F3E1D, verificado: 30 de enero de 2013.
14. PERALTA, N.; PAGGI, M.;CALANDRONI M.; COSTA, J. 2012. Relación entre la conductividad eléctrica aparente y la profundidad del suelo en la diferenciación de suelos. xxiil Congreso Argentino de la Ciencia del Suelo. Mar del Plata, Buenos Aires, Argentina.
15. PURICELLI, C.A.; PURICELLI, M.M.; KRUGER H.R. 1997. Profundidad útil del suelo y rendimiento del trigo. EEA INTA Bordenave. Boletín Técnico N.º 14, Septiembre 1997.
16. ROSS, F. 2012. Determinación espacial de la profundidad de suelo (tosca) y su relación con el rendimiento del cultivo. Chacra Experimental Integrada de Barrow. (http://inta.gob.ar/documentos/determinacion-espacial-de-la-productividad-de-suelo-tosca-y-surelacioncon-el-rendimiento-de-cultivo/, verificado: 20 de enero de 2013.
17. SAINZ ROZAS, H. R.; ECHEVERRIA, H.E.; ANGELINI. H.P. 2011. Niveles de carbono orgánico y pH en suelos agrícolas de las regiones pampeana y extrapampeana argentina. Cienc. suelo. Vol.29(1), 29-37. (http://www.scielo.org.ar/scielo.php?script=sci_arttext&pid=S1850-20672011000100004&lng=es&nrm=iso, verificado: 18 de enero de 2013.
18. TABIOS, G.Q.; SALAS J.D. 1985. A comparative analysis of techniques for spatial interpolation of precipitation. Water Resour. Bull. Vol. 21, 365-380.
19. VILLATORO, M.; HENRÍQUEZ, C.; SANCHO, F. 2008. Comparación de los interpoladores IDW y Kriging en la variación espacial de Ph, Ca, Cice y P del suelo. Universidad de Costa Rica. Agronomía Costarricense, Vol. 32(1). 95-105. San José, Costa Rica.
20. WARRICK, A.W.; ZHANG, R.; EL-HARRIS, M.K.; MYERS, D.E. 1988. Direct comparisons between Kriging and other interpolators. En WIERENGA, P.J. and BACHELET, D. (ed.): Proc. Validation of flow and transport models for the unsaturated zone. New Mexico State University. Las Cruces, México.
21. WEBER, D.; ENGLUND, E. 1992. Evaluation and comparison of spatial interpolators II. Math. Geol. Vol 24, 381-391.
22. WOLLENHAUPTH, N.C.; WOLKOWSKI, R.P.; CLAYTON, M.K. 1994. Mapping soil test phosphorus and potassium for variablerate fertilizer application. J. Prod. Agric. Vol 7, 441-448.