










Servicios Personalizados
Revista

Articulo
 Inglés (pdf)
Inglés (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista de la Unión Matemática Argentina
versión impresa ISSN 0041-6932versión On-line ISSN 1669-9637
Rev. Unión Mat. Argent. v.47 n.1 Bahía Blanca ene./jun. 2006
Claudio Gorodski
Partially supported by FAPESP and CNPq.
Abstract: This is a short, elementary survey article about taut submanifolds. In order to simplify the exposition, we restrict to the case of compact smooth submanifolds of Euclidean or spherical spaces. Some new, partial results concerning taut 4-manifolds are discussed at the end of the text.
This is a short, elementary survey article about taut submanifolds. In order to simplify the exposition, we restrict to the case of compact smooth submanifolds of Euclidean or spherical spaces. Sections 2 through 4 collect basic definitions and general results. In Section 5, we explain in greater detail some useful techniques that we use in Section 6 to prove some new, partial classification results about taut  -manifolds.
-manifolds.
2. The spherical two-piece property
Before introducing the concept of tautness, it is instructive to discuss the STPP. Let  be a compact surface embedded in an Euclidean sphere
be a compact surface embedded in an Euclidean sphere  . We say
. We say  has the spherical two-piece property, or STPP for short, if
has the spherical two-piece property, or STPP for short, if  is connected whenever
is connected whenever  is a closed ball in
is a closed ball in  [Ban70]. The STPP is equivalent to requiring that every Morse distance function of the form
[Ban70]. The STPP is equivalent to requiring that every Morse distance function of the form

has exactly one local minimum. Intuitively, this can be seen by remarking that the sublevel sets of the  are exactly the closed balls
are exactly the closed balls  . Moreover, by replacing
. Moreover, by replacing  by
by  , one sees that these conditions imply that every Morse distance function
, one sees that these conditions imply that every Morse distance function  also has exactly one local maximum. Let
also has exactly one local maximum. Let  be the
be the  th Betti number of
th Betti number of  where, unless explicitly stated, we will always use
where, unless explicitly stated, we will always use  coefficients to simplify the exposition, and let
coefficients to simplify the exposition, and let  be the number of critical points of a Morse distance function
be the number of critical points of a Morse distance function  . From the Morse relations for the Euler characteristic,
. From the Morse relations for the Euler characteristic,

one finally deduces that the STPP is equivalent to the fact that  for all
for all  and for all
and for all  such that
such that  is a Morse function.
is a Morse function.
Since the STPP is defined in terms of intersections with closed balls, it is immediate that it is a conformally invariant property of compact surfaces in  . Of course, one can also consider the STPP for compact surfaces of Euclidean space. Since stereographic projection is a conformal transformation, the theories in
. Of course, one can also consider the STPP for compact surfaces of Euclidean space. Since stereographic projection is a conformal transformation, the theories in  and
and  are equivalent.
are equivalent.
It follows from results of Kuiper and Banchoff (see [Ban70]) that a compact surface substantially embedded in  with the STPP is a round sphere or a cyclide of Dupin in
with the STPP is a round sphere or a cyclide of Dupin in  , or the Veronese embedding of a projective plane in
, or the Veronese embedding of a projective plane in  . Recall that an embedding into a sphere is called substantial if its image does not lie in a sphere of smaller dimension. Of course, it is enough for us to consider only substantial embeddings.
. Recall that an embedding into a sphere is called substantial if its image does not lie in a sphere of smaller dimension. Of course, it is enough for us to consider only substantial embeddings.
We finally note that the STPP condition is also equivalent to requiring that the induced homomorphism

in  ech homology is injective for every closed ball
ech homology is injective for every closed ball  . The use of
. The use of  ech homology allows one to use all closed balls rather than only those determined by level sets of distance functions that are Morse functions. If one prefers to use singular homology, than the equivalent condition is reformulated in terms that the above homomorphism in singular homology be injective for almost every closed ball.
ech homology allows one to use all closed balls rather than only those determined by level sets of distance functions that are Morse functions. If one prefers to use singular homology, than the equivalent condition is reformulated in terms that the above homomorphism in singular homology be injective for almost every closed ball.
Now we come to the main concept in this text. Let  be a compact submanifold embedded in
be a compact submanifold embedded in  . We say
. We say  is taut if the induced homomorphism
is taut if the induced homomorphism
 | (1) |
in  ech homology is injective for every closed ball
ech homology is injective for every closed ball  and for all
and for all  . This is equivalent to requiring that every Morse distance function
. This is equivalent to requiring that every Morse distance function  satisfies
satisfies  for all
for all  , i.e.
, i.e.  is
is  -perfect. Taut submanifolds were first considered by Carter and West [CW72]. It is clear that tautness is equivalent to the STPP in the case of surfaces. In the case of
-perfect. Taut submanifolds were first considered by Carter and West [CW72]. It is clear that tautness is equivalent to the STPP in the case of surfaces. In the case of  -manifolds, there is only a classification of the diffeomorphism types of manifolds admitting taut embeddings, which was given by Pinkall and Thorbergsson [PT89]. They remark that a geometrical classification, if possible, is expected to be a complicated problem since most of the examples already known depend on many parameters. Their result is that there are seven types of such
-manifolds, there is only a classification of the diffeomorphism types of manifolds admitting taut embeddings, which was given by Pinkall and Thorbergsson [PT89]. They remark that a geometrical classification, if possible, is expected to be a complicated problem since most of the examples already known depend on many parameters. Their result is that there are seven types of such  -manifolds, namely
-manifolds, namely  ,
,  ,
,  ,
,  ,
,  ,
,  and
and  . Here
. Here  is the quaternion group, and
is the quaternion group, and  is a diffeomorphism of
is a diffeomorphism of  that acts on each factor as the antipodal map. A classification of
that acts on each factor as the antipodal map. A classification of  -manifolds admitting taut embeddings along similar lines seems feasible, and we will come back to this point in the last section.
-manifolds admitting taut embeddings along similar lines seems feasible, and we will come back to this point in the last section.
Next we present other classes of examples of taut submanifolds. Clifford tori and the standard embeddings of projective spaces are important examples. We will not justify this assertion now, since these examples will be generalized below. It follows from the Chern-Lashof theorem [CL57] that the sphere  can only be tautly embedded in Euclidean space as a round hypersphere in an affine subspace. This result also admits an alternative proof for
can only be tautly embedded in Euclidean space as a round hypersphere in an affine subspace. This result also admits an alternative proof for  by noting that the homology of
by noting that the homology of  is trivial except in dimensions
is trivial except in dimensions  and
and  , which implies that a Morse distance function to a taut embedding of
, which implies that a Morse distance function to a taut embedding of  can have only critical points of index
can have only critical points of index  and
and  , and so a focal point is necessarily of multiplicity
, and so a focal point is necessarily of multiplicity  , which yields that
, which yields that  is umbilic according to an argument sketched below in Section 5 (compare [NR72]). Moving towards manifolds with more complicated topology, Cecil and Ryan proved that a taut
is umbilic according to an argument sketched below in Section 5 (compare [NR72]). Moving towards manifolds with more complicated topology, Cecil and Ryan proved that a taut  -dimensional compact hypersurface of
-dimensional compact hypersurface of  with the same homology as
with the same homology as  has precisely two principal curvatures at each point, and the principal curvatures are constant along the corresponding curvature distributions [CR78]. They called such a hypersurface a (high-dimensional) cyclide of Dupin. Thorbergsson considered the case of a taut compact submanifold of dimension
has precisely two principal curvatures at each point, and the principal curvatures are constant along the corresponding curvature distributions [CR78]. They called such a hypersurface a (high-dimensional) cyclide of Dupin. Thorbergsson considered the case of a taut compact submanifold of dimension  that is
that is  -connected but not
-connected but not  -connected, and showed that it must be either a cyclide of Dupin diffeomorphic to
-connected, and showed that it must be either a cyclide of Dupin diffeomorphic to  or the standard embedding of a projective plane over one of the four normed division algebras [Tho83b].
or the standard embedding of a projective plane over one of the four normed division algebras [Tho83b].
In another development, Bott and Samelson proved that the orbits of the isotropy representations of the symmetric spaces, sometimes called  -representa-tions, are tautly embedded by explicitly constructing cycles forming a basis in
-representa-tions, are tautly embedded by explicitly constructing cycles forming a basis in  -homology for these orbits [BS58]. These orbits are known as the generalized flag manifolds. The generalized flag manifolds are homogeneous examples of another very important, more general class of submanifolds, called isoparametric submanifolds. Hsiang, Palais and Terng proved that isoparametric submanifolds and their focal submanifolds are taut [HPT88].
-homology for these orbits [BS58]. These orbits are known as the generalized flag manifolds. The generalized flag manifolds are homogeneous examples of another very important, more general class of submanifolds, called isoparametric submanifolds. Hsiang, Palais and Terng proved that isoparametric submanifolds and their focal submanifolds are taut [HPT88].
Most of the known examples of taut embeddings are homogeneous spaces. On the other hand, Thorbergsson derived some necessary topological conditions for a homogeneous space to admit a taut embedding, which allowed him to exhibit some examples of homogeneous spaces which cannot be tautly embedded, e.g. the lens spaces distinct from the real projective space [Tho88].
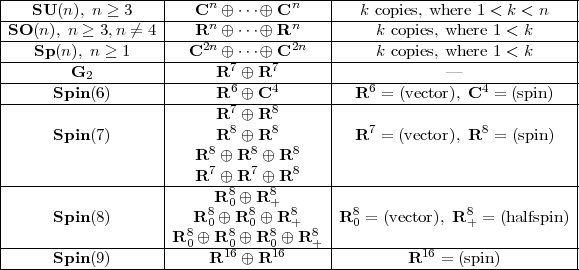
Thorbergsson and I approached the problem of classifying taut compact submanifolds of Euclidean space which are extrinsically Riemannian homogeneous by first studying taut representations, namely those representations of compact Lie groups all of whose orbits are tautly embedded. The only examples known at that time were the  -representations, and many proofs had been given of the tautness of special cases of generalized flag manifolds where the arguments were easier. In [GT03] (see also [GT00]), we classified the taut irreducible representations of the compact Lie groups. It turns out that the classification includes three families of representations that are not
-representations, and many proofs had been given of the tautness of special cases of generalized flag manifolds where the arguments were easier. In [GT03] (see also [GT00]), we classified the taut irreducible representations of the compact Lie groups. It turns out that the classification includes three families of representations that are not  -representations, thereby supplying many new examples of tautly embedded homogeneous spaces. These families are given by the following table, where
-representations, thereby supplying many new examples of tautly embedded homogeneous spaces. These families are given by the following table, where  .
.

It is worth noting that these representations are exactly those representations of cohomogeneity three that are not  -representations. In [GT02], we showed that the orbits of these representations also admit cycles of Bott-Samelson type.
-representations. In [GT02], we showed that the orbits of these representations also admit cycles of Bott-Samelson type.
The proof of the classification theorem in [GT03] is long and intrincate. It starts with a remark by Kuiper that implies that a taut irreducible representation has the property that the second osculating spaces of all of its nontrivial orbits coincide with the ambient space [Kui61]. We call representations with this property, irreducible or not, of class  . The class
. The class  is much more easy to deal with since it involves an infinitesimal condition. Indeed, we establish necessary upper bounds for the Dadok invariant
is much more easy to deal with since it involves an infinitesimal condition. Indeed, we establish necessary upper bounds for the Dadok invariant  (which is an integral algebraic invariant of an irreducible representation, see [Dad85]) for irreducible representations of class
(which is an integral algebraic invariant of an irreducible representation, see [Dad85]) for irreducible representations of class  , which allows us to reduce a lot the size of that class in such a way that the remaining cases are treated with geometrical methods that we develop in the second part of the proof.
, which allows us to reduce a lot the size of that class in such a way that the remaining cases are treated with geometrical methods that we develop in the second part of the proof.
There are three main strategies involved in these methods. The first one often works a kind of induction. It states that any slice representation of a taut representations inherits the property of being taut. (Recall that the slice representation of a representation at a point  is the representation induced by the isotropy subgroup at
is the representation induced by the isotropy subgroup at  on the normal space to the orbit through
on the normal space to the orbit through  at
at  .) The second one might be called "the fundamental result about taut sums". It relates the topology of the orbits of a taut reducible representation to the topology of the orbits of its summands. Finally, the third strategy invokes a reduction principle in transformation groups which grosso modo reduces the task of deciding whether a given representation is taut or not to the study of the tautness of a much simpler representation with trivial principal isotropy subgroup.
.) The second one might be called "the fundamental result about taut sums". It relates the topology of the orbits of a taut reducible representation to the topology of the orbits of its summands. Finally, the third strategy invokes a reduction principle in transformation groups which grosso modo reduces the task of deciding whether a given representation is taut or not to the study of the tautness of a much simpler representation with trivial principal isotropy subgroup.
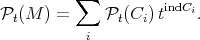
The combination of the above three strategies is also effective in the classification of taut reducible representations of compact simple Lie groups which I completed in [Gor04]. In this case, since every orbit of a summand of a taut reducible representation is also an orbit of the sum, it follows from the classification in the irreducible case that every irreducible summand of a taut reducible representation is an  -representation, and we need only to decide which sums of
-representation, and we need only to decide which sums of  -representations remain taut. Each compact simple Lie group admits few
-representations remain taut. Each compact simple Lie group admits few  -representations, so that the analysis via the geometrical methods discussed in the previous paragraph can be effectively carried out and the final result is given in the following table.
-representations, so that the analysis via the geometrical methods discussed in the previous paragraph can be effectively carried out and the final result is given in the following table.
We make two simple remarks regarding the representations appearing in this table. The first one is that in the case of the first representation in the table, any number of summands  in the sum can be replaced by the dual representation
in the sum can be replaced by the dual representation  , and the resulting representation remains taut. The second one is that the representations of
, and the resulting representation remains taut. The second one is that the representations of  are listed up to composition with an outer automorphism of the Lie group, so the pair
are listed up to composition with an outer automorphism of the Lie group, so the pair  appearing in the list can be replaced by any pair of inequivalent
appearing in the list can be replaced by any pair of inequivalent  -dimensional representations of
-dimensional representations of  , and the resulting representations for
, and the resulting representations for  will still be taut.
will still be taut.
Despite these results, the classification of taut extrinsically Riemannian homogeneous submanifolds of Euclidean space is still far from complete. For example, we still do not know what the taut reducible representations of the nonsimple groups are.
5. The Morse index theorem, proper Dupin submanifolds, and Ozawa's theorem
In this section, we review a collection of methods related to taut submanifolds that were used in [PT89] and will be useful here.
Let  be a compact smooth
be a compact smooth  -manifold substantially embedded in
-manifold substantially embedded in  . Later we will specify to the case in which
. Later we will specify to the case in which  is tautly embedded. Denote by
is tautly embedded. Denote by  the unit normal bundle of
the unit normal bundle of  in
in  . A focal point of
. A focal point of  in
in  is a critical value of the restriction of the exponential map of
is a critical value of the restriction of the exponential map of  to
to  . According to this definition,
. According to this definition,  is a focal point of
is a focal point of  for every
for every  if
if  . This kind of focal point is uninteresting for us since it does not relate to the geometry of
. This kind of focal point is uninteresting for us since it does not relate to the geometry of  , but rather to the fact that any pair of antipodal points are conjugate in the sphere. Therefore in the following we will completely disconsider this kind of focal point. All the other focal points of
, but rather to the fact that any pair of antipodal points are conjugate in the sphere. Therefore in the following we will completely disconsider this kind of focal point. All the other focal points of  can be described as follows. For
can be described as follows. For  , the set of focal points of
, the set of focal points of  lying in the normal ray defined by
lying in the normal ray defined by  is discrete and in correspondence with the principal curvatures of
is discrete and in correspondence with the principal curvatures of  relative to the Weingarten operator
relative to the Weingarten operator  in such a way that for a focal distance
in such a way that for a focal distance  there corresponds an eigenvalue
there corresponds an eigenvalue  of
of  .
.
Now it can be checked that a point  is a focal point of
is a focal point of  if and only if the distance function
if and only if the distance function  is not a Morse function. In this case,
is not a Morse function. In this case,  is a focal point relative to some
is a focal point relative to some  ,
,  is a degenerate critical point of
is a degenerate critical point of  , and the multiplicity of
, and the multiplicity of  as a focal point relative to
as a focal point relative to  equals the nullity of the Hessian of
equals the nullity of the Hessian of  at
at  , which is also the the multiplicity of the corresponding principal curvature of
, which is also the the multiplicity of the corresponding principal curvature of  . For a nonfocal point
. For a nonfocal point  ,
,  is a Morse function and the Morse index theorem asserts that the index of a critical point
is a Morse function and the Morse index theorem asserts that the index of a critical point  of
of  equals the sum of the multiplicities of the focal points of
equals the sum of the multiplicities of the focal points of  lying in the normal geodesic segment
lying in the normal geodesic segment  .
.
It follows that the sum of the multiplicities of the focal points lying in any open half great circle joining  and
and  is
is  . Since
. Since  and
and  , we also have that for each focal distance
, we also have that for each focal distance  in the direction of
in the direction of  , there is a corresponding focal distance
, there is a corresponding focal distance  in the direction of
in the direction of  with the same multiplicity. Let
with the same multiplicity. Let  denote the number of distinct focal points lying in the open half great circle specified by
denote the number of distinct focal points lying in the open half great circle specified by  . We have that
. We have that  , as a function on
, as a function on  , is lower semicontinuous and there is an open and dense subset
, is lower semicontinuous and there is an open and dense subset  of
of  where
where  is locally constant and maximal. A normal vector
is locally constant and maximal. A normal vector  is called regular if it belongs to
is called regular if it belongs to  , and singular otherwise.
, and singular otherwise.
We suppose henceforth that  is tautly embedded in
is tautly embedded in  .
.
Now the condition that every unit normal vector is regular is equivalent to the condition that  be a proper Dupin submanifold of
be a proper Dupin submanifold of  [Pin86, Tho83a]. The latter means that the principal curvatures are constant along the corresponding curvature surfaces and the number of distinct principal curvatures is constant. In this case, there is a well defined ordered sequence
[Pin86, Tho83a]. The latter means that the principal curvatures are constant along the corresponding curvature surfaces and the number of distinct principal curvatures is constant. In this case, there is a well defined ordered sequence  of multiplicities of focal points of
of multiplicities of focal points of  along the normal ray defined by an arbitrary
along the normal ray defined by an arbitrary  . Here
. Here  is the (constant) number of distinct principal curvatures of
is the (constant) number of distinct principal curvatures of  .
.
If  is taut and there exists a unit normal vector
is taut and there exists a unit normal vector  such that
such that  , then
, then  is umbilic, and hence, a great hypersphere
is umbilic, and hence, a great hypersphere  in
in  . This can be seen as follows. Let
. This can be seen as follows. Let  be the first focal point of
be the first focal point of  in the direction of
in the direction of  . The multiplicity of
. The multiplicity of  is
is  by hypothesis. Consider the geodesic segment
by hypothesis. Consider the geodesic segment  , the open half great circle
, the open half great circle  containing it, and a point
containing it, and a point  belonging to
belonging to  . The Morse index theorem implies that the index of
. The Morse index theorem implies that the index of  as a critical point of
as a critical point of  is
is  or
or  , according to whether
, according to whether  occurs between
occurs between  and
and  or past
or past  . It follows that
. It follows that  is a local minimum or a local maximum of
is a local minimum or a local maximum of  , respectively. By tautness of
, respectively. By tautness of  , there can be only one local minimum (resp. local maximum), so this is also a global minimum (resp. global maximum). Letting
, there can be only one local minimum (resp. local maximum), so this is also a global minimum (resp. global maximum). Letting  tend to
tend to  in both cases shows that
in both cases shows that  is contained in the hypersphere of center
is contained in the hypersphere of center  and radius
and radius  , and hence
, and hence  coincides with that hypersphere.
coincides with that hypersphere.
As was said above, if  is taut and
is taut and  is a focal point, then
is a focal point, then  is not a Morse function, but there is a very useful theorem by Ozawa [Oza86] that asserts that
is not a Morse function, but there is a very useful theorem by Ozawa [Oza86] that asserts that  is a
is a  -perfect Morse-Bott function and the connected components of the critical set of
-perfect Morse-Bott function and the connected components of the critical set of  are compact smooth taut submanifolds of
are compact smooth taut submanifolds of  . Recall that a function
. Recall that a function  is called a Morse-Bott function if the connected components of its critical set are smooth submanifolds along each of which the nullity of the Hessian of
is called a Morse-Bott function if the connected components of its critical set are smooth submanifolds along each of which the nullity of the Hessian of  is constant and equal to the dimension of the component [Bot54]. In this case, the index of
is constant and equal to the dimension of the component [Bot54]. In this case, the index of  along a critical manifold is by definition the index of the Hessian of
along a critical manifold is by definition the index of the Hessian of  restricted to the normal bundle of that critical manifold. A Morse-Bott function
restricted to the normal bundle of that critical manifold. A Morse-Bott function  on
on  is perfect if it satisfies the Morse-Bott equalities, namely the Poincaré polynomials of
is perfect if it satisfies the Morse-Bott equalities, namely the Poincaré polynomials of  and those of the critical manifolds
and those of the critical manifolds  of
of  are related by the formula
are related by the formula
If  is taut, it follows from Ozawa's theorem and the Morse-Bott equalities that the
is taut, it follows from Ozawa's theorem and the Morse-Bott equalities that the  -homology of the critical manifold corresponding to the set of minima (resp. maxima) of a distance function
-homology of the critical manifold corresponding to the set of minima (resp. maxima) of a distance function  injects into the
injects into the  -homology of
-homology of  . Such critical sets are called top sets or top cycles, or yet top circles, top tori, etc., when their topology is specified, following terminology introduced by Kuiper and expanded by Pinkall and Thorbergsson. For each
. Such critical sets are called top sets or top cycles, or yet top circles, top tori, etc., when their topology is specified, following terminology introduced by Kuiper and expanded by Pinkall and Thorbergsson. For each  , we denote by
, we denote by  the top cycle which is the set of minima of
the top cycle which is the set of minima of  , where
, where  is the first focal point in the normal ray defined by
is the first focal point in the normal ray defined by  .
.
Another interesting consequence of Ozawa's theorem is that the definition of a taut submanifold can be restated so as to require that the homomorphism (1) in singular homology be injective for all closed balls  .
.
In this section we present some new, partial results about the classification of compact smooth manifolds of dimension four that admit taut embeddings. We start with the two following results, the first one of which has already been noticed by Thorbergsson.
Theorem 1. A compact four-dimensional smooth taut submanifold  with vanishing first Betti number is diffeomorphic to
with vanishing first Betti number is diffeomorphic to  ,
,  or
or  .
.
Proof. If  , then
, then  is a
is a  -homology sphere, and we have already seen that it must be a hypersphere
-homology sphere, and we have already seen that it must be a hypersphere  in
in  .
.
Next, we remark that a taut submanifold with  must be simply connected. This is because it admits a
must be simply connected. This is because it admits a  -perfect Morse function, and such a function has no critical points of index one (compare Lemma 4.11(1) in [CE75]).
-perfect Morse function, and such a function has no critical points of index one (compare Lemma 4.11(1) in [CE75]).
If  , it follows from the preceeding remark that
, it follows from the preceeding remark that  is a taut
is a taut  -manifold that is
-manifold that is  -connected but not
-connected but not  -connected. Therefore Theorem A in [Tho83b] says that either
-connected. Therefore Theorem A in [Tho83b] says that either  is a cyclide of Dupin of type
is a cyclide of Dupin of type  in
in  , or
, or  is diffeomorphic to
is diffeomorphic to  and sits inside
and sits inside  . Recall that the standard embedding of
. Recall that the standard embedding of  in
in  is taut.
is taut. 
Theorem 2. A compact four-dimensional smooth taut submanifold  with vanishing second Betti number is diffeomorphic to
with vanishing second Betti number is diffeomorphic to  or
or  .
.
Proof. By Theorem 1, we may assume that  . Then, by hypothesis and
. Then, by hypothesis and  -Poincaré duality, exactly four
-Poincaré duality, exactly four  -homology groups of
-homology groups of  are nonzero. It follows from Theorem 3.2 in [Oza86] that
are nonzero. It follows from Theorem 3.2 in [Oza86] that  (this also follows from Theorem 11 in [Heb88]).
(this also follows from Theorem 11 in [Heb88]).
We will use some basic facts about the topology of  -manifolds [GS99]. Since there is a Morse function on
-manifolds [GS99]. Since there is a Morse function on  with one critical point of each index
with one critical point of each index  ,
,  ,
,  ,
,  , there is a handle decomposition
, there is a handle decomposition  , where each
, where each  an
an  -handle attached via an attaching map.
-handle attached via an attaching map.
If  is orientable, then
is orientable, then  is an orientable handle,
is an orientable handle,  and
and  are both diffeomorphic to
are both diffeomorphic to  , and
, and  is obtained by glueing two copies of
is obtained by glueing two copies of  along their boundaries by a diffeomorphism
along their boundaries by a diffeomorphism  of
of  . The diffeomorphism class of
. The diffeomorphism class of  only depends on the diffeotopy class of
only depends on the diffeotopy class of  . It has been shown that the diffeotopy group of
. It has been shown that the diffeotopy group of  is isomorphic to
is isomorphic to  , where each generator extends to a diffeomorphism of
, where each generator extends to a diffeomorphism of  [Glu62]. It follows easily that there is at most one manifold in this case, which plainly is
[Glu62]. It follows easily that there is at most one manifold in this case, which plainly is  .
.
If  is nonorientable, then
is nonorientable, then  is a nonorientable handle,
is a nonorientable handle,  and
and  are both diffeomorphic to
are both diffeomorphic to  , the twisted
, the twisted  -disk bundle over
-disk bundle over  , and
, and  is obtained by glueing two copies of
is obtained by glueing two copies of  along their boundaries via a diffeomorphism of
along their boundaries via a diffeomorphism of  . Every diffeomorphism of
. Every diffeomorphism of  is diffeotopic to one that extends to
is diffeotopic to one that extends to  [KR90]. It follows as above that
[KR90]. It follows as above that  must be diffeomorphic to
must be diffeomorphic to  , but the following lemma shows that this case cannot occur. This finishes the proof.
, but the following lemma shows that this case cannot occur. This finishes the proof. 
Lemma 1. We have that  does not admit a taut embedding.
does not admit a taut embedding.
Proof. Suppose, on the contrary, that  admits a taut and substantial embedding into a sphere
admits a taut and substantial embedding into a sphere  . Since
. Since  , any top set must have vanishing second Betti number. It follows that
, any top set must have vanishing second Betti number. It follows that  cannot admit a
cannot admit a  -dimensional top set, and any
-dimensional top set, and any  -dimensional top set has the
-dimensional top set has the  -homology of
-homology of  . Therefore, any top set of
. Therefore, any top set of  , being taut, is diffeomorphic to
, being taut, is diffeomorphic to  or
or  . This implies that there is no
. This implies that there is no  with
with  . For otherwise, if
. For otherwise, if  is a point lying in between the second and third focal points in the normal ray defined by
is a point lying in between the second and third focal points in the normal ray defined by  , and
, and  is the foot point of
is the foot point of  , then
, then  is a critical point of index
is a critical point of index  of
of  , but
, but  .
.
Now, for every  ,
,  or
or  . We claim that
. We claim that  is proper Dupin. If not, there exist a singular
is proper Dupin. If not, there exist a singular  with
with  and a sequence
and a sequence  converging to
converging to  with
with  . By replacing
. By replacing  and the
and the  by their opposites if necessary, we may assume that the top set
by their opposites if necessary, we may assume that the top set  is diffeomorphic to
is diffeomorphic to  . The
. The  are round circles representing nontrivial one-dimensional homology classes of
are round circles representing nontrivial one-dimensional homology classes of  . A subsequence of the
. A subsequence of the  converges to a circle in
converges to a circle in  that is homologically nontrivial, and this is a contradiction (compare the proof of Theorem 2.2 in [Oza86]).
that is homologically nontrivial, and this is a contradiction (compare the proof of Theorem 2.2 in [Oza86]).
Now  is proper Dupin. Suppose first that
is proper Dupin. Suppose first that  for all
for all  . We cannot have
. We cannot have  , since
, since  is not a cyclide of Dupin, so
is not a cyclide of Dupin, so  . Note that the multiplicities of the principal curvatures are
. Note that the multiplicities of the principal curvatures are  and
and  . Let
. Let  be a small tube around
be a small tube around  . Then
. Then  is a proper Dupin hypersurface with three distinct principal curvatures of multiplicities
is a proper Dupin hypersurface with three distinct principal curvatures of multiplicities  ,
,  and
and  . It is known that a proper Dupin hypersurface with
. It is known that a proper Dupin hypersurface with  distinct principal curvatures has all multiplicities equal [Miy84], so this case cannot occur.
distinct principal curvatures has all multiplicities equal [Miy84], so this case cannot occur.
Suppose now that  for all
for all  . A small tube
. A small tube  around
around  is a proper Dupin hypersurface with
is a proper Dupin hypersurface with  distinct principal curvatures of multiplicities
distinct principal curvatures of multiplicities  . It is known that in the case of
. It is known that in the case of  distinct principal curvatures there are at most two different multiplicities [GH91]. It follows that
distinct principal curvatures there are at most two different multiplicities [GH91]. It follows that  . Let
. Let  and
and  be the two components of
be the two components of  and assume that
and assume that  . It follows from the Mayer-Vietoris sequence that
. It follows from the Mayer-Vietoris sequence that

Since  is homotopy equivalent to
is homotopy equivalent to  , we see that
, we see that 
 (see [Hat02], p. 238). On the other hand, by [GH91],
(see [Hat02], p. 238). On the other hand, by [GH91],  . This is a contradiction. Thus there can be no taut embedding.
. This is a contradiction. Thus there can be no taut embedding. 
Remarks 1. (i) As a consequence of Theorem 2, a compact smooth  -manifold with the same homology as
-manifold with the same homology as  which is tautly embedded in arbitrary codimension is diffeomorphic to
which is tautly embedded in arbitrary codimension is diffeomorphic to  (compare Theorem 2 in [CR78] and the next item (ii)).
(compare Theorem 2 in [CR78] and the next item (ii)).
(ii) According to Theorem 3.1 in [Oza86], the codimension of a taut and substantial embedding of  into a sphere is either
into a sphere is either  or
or  . Both codimensions can be realized. In fact,
. Both codimensions can be realized. In fact,  can be realized as a cyclide of Dupin in codimension one, and it is shown in [CR85] that any taut embedding of
can be realized as a cyclide of Dupin in codimension one, and it is shown in [CR85] that any taut embedding of  with codimension one is such a cyclide, and they are all Möbius equivalent to a tube around a circle in
with codimension one is such a cyclide, and they are all Möbius equivalent to a tube around a circle in  . Moreover,
. Moreover,  can also be tautly embedded in
can also be tautly embedded in  as a singular orbit of the isotropy representation of the Grassmann manifold
as a singular orbit of the isotropy representation of the Grassmann manifold  .
.
(iii) We have that  , where
, where  acts by the antipodal map on each factor, is diffeomorphic to
acts by the antipodal map on each factor, is diffeomorphic to  . In fact,
. In fact,  and
and  is a principal
is a principal  -bundle with a global section
-bundle with a global section  given by
given by
(iv) According to Theorem 8 in [Heb88],  cannot be tautly embedded into a sphere.
cannot be tautly embedded into a sphere.
Regarding the following conjecture, note that the principal orbits of the isotropy representation of the Grassmann manifold  are proper Dupin hypersurfaces in
are proper Dupin hypersurfaces in  diffeomorphic to
diffeomorphic to  .
.
Conjecture 1. A compact embedded proper Dupin hypersurface in  with four distinct principal curvatures is diffeomorphic to
with four distinct principal curvatures is diffeomorphic to  .
.
We next present a proof of this conjecture that uses that the Poincaré conjecture in dimension  is true (there has been recent progress by Perelman on this conjecture, see [Mor05]). Let
is true (there has been recent progress by Perelman on this conjecture, see [Mor05]). Let  be a compact embedded proper Dupin hypersurface in
be a compact embedded proper Dupin hypersurface in  with four distinct principal curvatures. Then the multiplicities of focal points along a normal ray are
with four distinct principal curvatures. Then the multiplicities of focal points along a normal ray are  . For a fixed unit normal vector field, let
. For a fixed unit normal vector field, let  (resp.
(resp.  ) denote the set of focal points corresponding to the largest (resp. smallest) principal curvature, and let
) denote the set of focal points corresponding to the largest (resp. smallest) principal curvature, and let  be the focal maps. Then these are circle bundles whose fibers consist of the circles of curvature. It follows from the proof of Proposition 3.5 in [GH91] that
be the focal maps. Then these are circle bundles whose fibers consist of the circles of curvature. It follows from the proof of Proposition 3.5 in [GH91] that  and
and  or
or  and
and  , and we may assume we are in the first case just by replacing the normal field by its opposite if necessary. Now the universal covering manifold of
, and we may assume we are in the first case just by replacing the normal field by its opposite if necessary. Now the universal covering manifold of  is a simply connected compact
is a simply connected compact  -manifold, hence diffeomorphic to
-manifold, hence diffeomorphic to  if the Poincaré conjecture is true. The quotient of
if the Poincaré conjecture is true. The quotient of  by a fixed point free involution is diffeomorphic to
by a fixed point free involution is diffeomorphic to  according to [Liv60], so
according to [Liv60], so  is diffeomorphic to
is diffeomorphic to  . So far we know that
. So far we know that  is a circle bundle over
is a circle bundle over  . Besides the trivial one, there are exactly two other circle bundles over
. Besides the trivial one, there are exactly two other circle bundles over  , one oriented, one nonoriented (in fact, the associated
, one oriented, one nonoriented (in fact, the associated  -plane bundles are
-plane bundles are  and
and  , where
, where  is the trivial line bundle and
is the trivial line bundle and  is the tautological line bundle [Lev63]). Let
is the tautological line bundle [Lev63]). Let  ,
,  respectively denote the total spaces of these bundles. Using the Gysin sequence in the oriented case, one easily computes that
respectively denote the total spaces of these bundles. Using the Gysin sequence in the oriented case, one easily computes that  , and hence,
, and hence,  . Using the Serre homology spectral sequence in the nonoriented case, it is also not difficult to see that
. Using the Serre homology spectral sequence in the nonoriented case, it is also not difficult to see that  is a
is a  -extension of
-extension of  . In any case,
. In any case,  and
and  do not have the integral homology of the trivial circle bundle
do not have the integral homology of the trivial circle bundle  . But
. But  must have the integral homology of
must have the integral homology of  according to [GH91]. It follows that
according to [GH91]. It follows that  is diffeomorphic to
is diffeomorphic to  .
.
It is easy to construct other examples of taut embeddings of compact smooth  -manifolds that are not covered by the previous results, so there is still a lot of work to be done in order to achieve a complete classification. In the case of taut hypersurfaces in
-manifolds that are not covered by the previous results, so there is still a lot of work to be done in order to achieve a complete classification. In the case of taut hypersurfaces in  with no more than three distinct principal curvatures at each point, we have the following theorem [Nie91].
with no more than three distinct principal curvatures at each point, we have the following theorem [Nie91].
Theorem 3 (Niebergall). Let  be a compact smooth taut hypersurface in
be a compact smooth taut hypersurface in  . If
. If  has at most three distinct principal curvatures at each point, then
has at most three distinct principal curvatures at each point, then  is diffeomorphic to one of the following
is diffeomorphic to one of the following  -manifolds:
-manifolds:  ,
,  ,
,  ,
,  , or the nontrivial
, or the nontrivial  -bundle over
-bundle over  .
.
Niebergall proves this theorem by first remarking that there is an open and dense subset  of
of  where the multiplicities of the principal curvatures are locally constant. Then each connected component of
where the multiplicities of the principal curvatures are locally constant. Then each connected component of  is a piece of a proper Dupin hypersurface with three distinct principal curvatures in
is a piece of a proper Dupin hypersurface with three distinct principal curvatures in  . By the main result of [Nie91], each connected component of
. By the main result of [Nie91], each connected component of  is then a reducible proper Dupin hypersurface [Pin85], and hence can be reconstructed from lower dimensional proper Dupin hypersurfaces, where the possibilities for these are already known. The final step of the argument uses an unpublished result of Pinkall stating that a taut hypersurface is analytic.
is then a reducible proper Dupin hypersurface [Pin85], and hence can be reconstructed from lower dimensional proper Dupin hypersurfaces, where the possibilities for these are already known. The final step of the argument uses an unpublished result of Pinkall stating that a taut hypersurface is analytic.
We finish this text with the following lemma which refers to the case of a taut hypersurface in  with generically four distinct principal curvatures.
with generically four distinct principal curvatures.
Lemma 2. A compact taut hypersurface  in
in  with four distinct principal curvatures at some point has
with four distinct principal curvatures at some point has  for
for  ,
,  ,
,  .
.
Proof. Let  with
with  . Then the multiplicities of the focal points in the direction of
. Then the multiplicities of the focal points in the direction of  are
are  . Let
. Let  be a point in the normal ray issuing from
be a point in the normal ray issuing from  in the direction of
in the direction of  that comes after the second focal point and before the third one. Then
that comes after the second focal point and before the third one. Then  has a critical point of index
has a critical point of index  at
at  , so
, so  . Upon a choice of unit normal vector field on
. Upon a choice of unit normal vector field on  , there is an identification of
, there is an identification of  with
with  . Let
. Let  be the restriction of the endpoint map. The focal set of
be the restriction of the endpoint map. The focal set of  consists of the critical values of
consists of the critical values of  and consists of focal varieties of codimension at least
and consists of focal varieties of codimension at least  , hence its complement
, hence its complement  is connected. Let
is connected. Let  . Then
. Then  is a local diffeomorphism. For
is a local diffeomorphism. For  , let
, let  be the index of
be the index of  as a critical point of
as a critical point of  for
for  . Then
. Then  is locally constant. Decompose
is locally constant. Decompose  into a disjoint union of nonempty open subsets
into a disjoint union of nonempty open subsets

where  . If
. If  , then
, then  is a diffeomorphism. This implies that
is a diffeomorphism. This implies that  is connected, but it is clear that
is connected, but it is clear that  must contain points on both sides of
must contain points on both sides of  , so this is a contradiction. Hence,
, so this is a contradiction. Hence,  . Similarly,
. Similarly,  .
. 
We would like to thank Professor D. L. Gonçalves and Professor G. Thorbergsson for very useful discussions, and specially the members of the organizing committee of the II Encuentro de Geometría Diferencial for their outstanding hospitality.
[Ban70] T. F. Banchoff, The spherical two-piece property and tight surfaces in spheres, J. Differential Geom. 4 (1970), 193-205. [ Links ]
[Bot54] R. Bott, Nondegenerate critical manifolds, Ann. of Math. (2) 60 (1954), 248-261. [ Links ]
[BS58] R. Bott and H. Samelson, Applications of the theory of Morse to symmetric spaces, Amer. J. Math. 80 (1958), 964-1029, Correction in Amer. J. Math. 83 (1961), 207-208. [ Links ]
[CE75] J. Cheeger and D. G. Ebin, Comparison theorems in Riemannian geometry, North-Holland Mathematical Library, vol. 9, North-Holland Publishing Co., Amsterdam-Oxford; American Elsevier Publishing Co., Inc., New York, 1975. [ Links ]
[CL57] S. S. Chern and R. Lashof, On the total curvature of immersed manifolds, Amer. J. Math. 79 (1957), 306-318. [ Links ]
[CR78] T. E. Cecil and P. J. Ryan, Focal sets, taut embeddings and the cyclides of Dupin, Math. Ann. 236 (1978), 177-190. [ Links ]
[CR85] T. E. Cecil and P. J. Ryan, Tight and taut immersions of manifolds, Research Notes in Mathematics, no. 107, Pitman, 1985. [ Links ]
[CW72] S. Carter and A. West, Tight and taut immersions, Proc. London. Math. Soc. 25 (1972), 701-720. [ Links ]
[Dad85] J. Dadok, Polar actions induced by actions of compact Lie groups, Trans. Amer. Math. Soc. 288 (1985), 125-137. [ Links ]
[GH91] K. Grove and S. Halperin, Elliptic isometries, condition (C) and proper maps, Arch. Math. (Basel) 56 (1991), 288-299. [ Links ]
[Glu62] H. Gluck, Embedding of two-spheres in the four-sphere, Trans. Amer. Math. Soc. 104 (1962), 308-333. [ Links ]
[Gor04] C. Gorodski, Taut reducible representations of compact simple Lie groups, Preprint, Univ. of São Paulo, (also E-print math. DG/0404269), 2004. [ Links ]
[GS99] R. E. Gompf and A. I. Stipsicz, 4-manifolds and Kirby calculus, Graduate Studies in Mathematics, vol. 20, American Mathematical Society, 1999. [ Links ]
[GT00] C. Gorodski and G. Thorbergsson, Representations of compact Lie groups and the osculating spaces of their orbits, Preprint, Univ. of Cologne, (also E-print math. DG/0203196), 2000. [ Links ]
[GT02] C. Gorodski and G. Thorbergsson, Cycles of Bott-Samelson type for taut representations, Ann. Global Anal. Geom. 21 (2002), 287-302. [ Links ]
[GT03] C. Gorodski and G. Thorbergsson, The classification of taut irreducible representations, J. Reine Angew. Math. 555 (2003), 187-235. [ Links ]
[Hat02] A. Hatcher, Algebraic topology, Cambridge University Press, Cambridge, 2002. [ Links ]
[Heb88] J. Hebda, The possible cohomology ring of certain types of taut submanifolds, Nagoya Math. J. 111 (1988), 85-97. [ Links ]
[HPT88] W.-Y. Hsiang, R. S. Palais, and C.-L. Terng, The topology of isoparametric submanifolds, J. Differential Geom. 27 (1988), 423-460. [ Links ]
[KR90] M. Ho Kim and F. Raymond, The diffeotopy group of the twisted 2-sphere bundle over the circle, Trans. Amer. Math. Soc. 322 (1990), no. 1, 159-168. [ Links ]
[Kui61] N. H. Kuiper, Sur les immersions à courbure totale minimale, Séminaire de Topologie et Géometrie Différentielle C. Ereshmann, Paris, vol. II, 1961, Recueil d'exposés faits en 1958-1959-1960. [ Links ]
[Lev63] J. Levine, Spaces with involution and bundles over Pn, Amer. J. Math. 85 (1963), 516-540. [ Links ]
[Liv60] G. R. Livesay, Fixed point free involutions on the 3-sphere, Ann. Math. (2) 72 (1960), 603-611. [ Links ]
[Miy84] R. Miyaoka, Taut embeddings and Dupin hypersurfaces, Differential geometry of submanifolds, Kyoto, 1984, Lecture Notes in Math., no. 1090, Springer, 1984, pp. 15-23. [ Links ]
[Mor05] J. W. Morgan, Recent progress on the Poincaré conjecture and the classification of 3-manifolds, Bull. Amer. Math. Soc. (N.S.) 42 (2005), no. 1, 57-78. [ Links ]
[Nie91] R. Niebergall, Dupin hypersurfaces in R5, I, Geom. Dedicata 40 (1991), 1-22. [ Links ]
[NR72] K. Nomizu and L. L. Rodriguez, Umbilical submanifolds and Morse functions, Nagoya Math. J. 48 (1972), 217-226. [ Links ]
[Oza86] T. Ozawa, On the critical sets of distance functions to a taut submanifold, Math. Ann. 276 (1986), 91-96. [ Links ]
[Pin85] U. Pinkall, Dupin hypersurfaces, Math. Ann. 270 (1985), 427-440. [ Links ]
[Pin86] U. Pinkall, Curvature properties of taut submanifolds, Geom. Dedicata 20 (1986), 79-83. [ Links ]
[PT89] U. Pinkall and G. Thorbergsson, Taut 3-manifolds, Topology 28 (1989), 389-401. [ Links ]
[Tho83a] G. Thorbergsson, Dupin hypersurfaces, Bull. London Math. Soc. 15 (1983), 493-498. [ Links ]
[Tho83b] G. Thorbergsson, Highly connected taut submanifolds, Math. Ann. 265 (1983), no. 3, 399-405. [ Links ]
[Tho88] G. Thorbergsson, Homogeneous spaces without taut embeddings, Duke Math. J. 57 (1988), 347-355. [ Links ]
Claudio Gorodski
Instituto de Matemática e Estatística,
Universidade de São Paulo
Rua do Matão, 1010
São Paulo, SP 05508-090 - Brazil
gorodski@ime.usp.br
Recibido: 15 de octubre de 2005
Aceptado: 27 de septiembre de 2006

